
麻省理工超材料嵌入式电极的3D 打印交互式输入设备
【导读】:
研究人员应用超材料开发了一种方法来创建3D 打印机制,以检测力如何施加到物体上。设计人员可以使用这种方法快速制作原型和 3D 打印设备,例如操纵杆、开关或手持控制器

麻省理工学院的研究人员开发了一种 3D 打印机制的新方法,可以检测力是如何施加到物体上的。这些结构由一块材料制成,因此可以快速制作原型。设计人员可以使用这种方法一次性 3D 打印“交互式输入设备”,例如操纵杆、开关或手持控制器。
为了实现这一目标,研究人员将电极集成到由超材料制成的结构中,超材料是分成重复细胞网格的材料。他们还创建了帮助用户构建这些交互式设备的编辑软件。
“超材料可以支持不同的机械功能。但是如果我们创造一个超材料门把手,我们是否也能知道门把手正在旋转,如果是,旋转了多少度?如果您有特殊的传感要求,我们的工作使您能够定制一个机制来满足您的需求,”共同主要作者、前访问博士的龚军说。麻省理工学院的学生,现在是苹果公司的研究科学家。
“我觉得这个项目最令人兴奋的是能够将传感直接集成到物体的材料结构中。这将实现新的智能环境,我们的物体可以在其中感知与它们的每次交互,”穆勒说。“例如,当用户坐在上面时,由我们的智能材料制成的椅子或沙发可以检测到用户的身体,并使用它来查询特定功能(例如打开灯或电视)或收集数据以供以后分析(例如检测和纠正身体姿势)。”
嵌入式电极
由于超材料由单元格制成,当用户对超材料对象施加力时,一些柔性的内部单元会拉伸或压缩。
研究人员通过创建“导电剪切电池”来利用这一点,这种柔性电池具有两个由导电细丝制成的相对壁和两个由非导电细丝制成的壁。导电壁起到电极的作用。
当用户向超材料机构施加力时——移动操纵杆手柄或按下控制器上的按钮——导电剪切单元拉伸或压缩,并且相对电极之间的距离和重叠面积发生变化。使用电容感应,这些变化可以被测量并用于计算所施加力的大小和方向,以及旋转和加速度。
为了证明这一点,研究人员创建了一个超材料操纵杆,在手柄底部的每个方向(上、下、左和右)嵌入了四个导电剪切单元。当用户移动操纵杆手柄时,相对的导电壁之间的距离和面积会发生变化,因此可以感应到每个施加的力的方向和大小。在这种情况下,这些值被转换为“PAC-MAN”游戏的输入。
机器人与3D打印植入物结合,怎样实现膝关节置换?
根据3D科学谷的市场研究,CONFORMIS 等创新型骨科医疗器械制造商,凭借3D打印个性化膝关节植入物以及新商业模式进入到了膝关节置换市场,在骨科植入物巨头的竞争环绕之下,成为一股新的增长力量。 《3D打印与骨科植入物白皮书》第三版© 3D科学谷 如今,膝关节
通过了解操纵杆用户如何施加力,设计师可以为在某些方向上握力有限的人设计独特的手柄形状和尺寸。
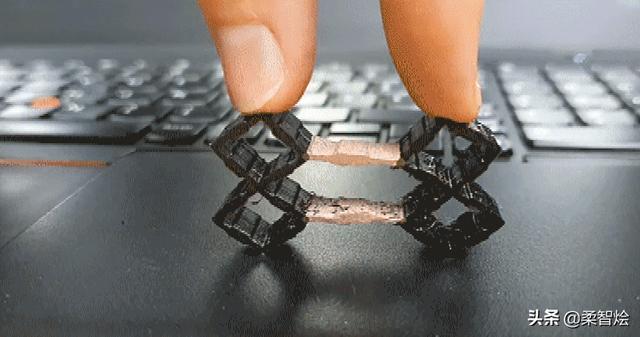
研究人员还创建了一个音乐控制器,旨在适应用户的手部。当用户按下其中一个柔性按钮时,结构内的导电剪切单元被压缩,感测到的输入被发送到数字合成器。

集成到这种 3D 打印超材料机制中的铜色电容感应电极用于感应压缩。
这种方法可以让设计人员快速创建和调整独特、灵活的计算机输入设备,例如可挤压的音量控制器或可弯曲的手写笔。
3D打印编辑器 MetaSense软件解决方案
研究人员开发的 3D 编辑器 MetaSense 实现了这种快速原型设计。用户可以手动将传感集成到超材料设计中,或者让软件自动将导电剪切单元放置在最佳位置。
“该工具将模拟在施加不同力时物体如何变形,然后使用这种模拟变形来计算哪些单元格的距离变化最大。变化最大的单元格是导电剪切单元的最佳候选者,”龚说。
研究人员努力使 MetaSense 变得简单明了,但打印如此复杂的结构存在挑战。
“在多材料 3D 打印机中,一个喷嘴将用于非导电灯丝,一个喷嘴将用于导电灯丝。但这非常棘手,因为这两种材料可能具有非常不同的特性。需要大量参数调整才能解决关于理想的速度、温度等。但我们相信,随着 3D 打印技术的不断改进,未来用户将更容易做到这一点,”他说。
未来,研究人员希望改进 MetaSense 背后的算法,以实现更复杂的模拟。
他们还希望创建具有更多导电剪切电池的机制。龚说,在一个非常大的机制中嵌入数百或数千个导电剪切单元可以实现用户如何与对象交互的高分辨率、实时可视化。
